
Page 6 - Ketterer Torque-Motors t-Rex
P. 6
17°
30°
40°
ø12
10°
4.5
46.8
ø 34.5
ø 32
ø 44
ø 34.5
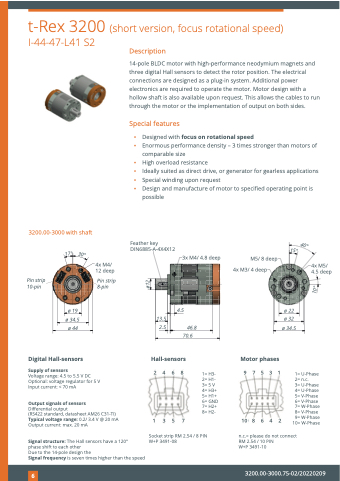
t-Rex 3200 (short version, focus rotational speed) I-44-47-L41 S2
3200.00-3000 with shaft
possible
Feather key DIN6885-A-4X4X12
Pin strip 10-pin
Digital Hall-sensors
Supply of sensors
Hall-sensors
2468
1357
Socket strip RM 2.54 / 8 PIN W+P 3491-08
Motor phases
ø 19
ø 22
Voltage range: 4.5 to 5.5 V DC Optional: voltage regulator for 5 V Input current: < 70 mA
Output signals of sensors
Differential output
(RS422 standard, datasheet AM26 C31-TI) Typical voltage range: 0.2/ 3.4 V @ 20 mA
Output current: max. 20 mA
Signal structure: The Hall sensors have a 120°
phase shift to each other
Due to the 14-pole design the
Signal frequency is seven times higher than the speed
1=
H3- 97531 2=
H1-
3=
5V
4=
H3+
5=
H1+
6=
GND
7=
H2+
8=
H2-
10 8 6 4 2
1= U-Phase 2= n.c.
3= U-Phase 4= U-Phase 5= V-Phase 6= V-Phase 7= W-Phase 8= V-Phase 9= W-Phase
4x M4/ 12 deep
Pin strip 8-pin
4x M5/ 4.5 deep
Description
14-pole BLDC motor with high-performance neodymium magnets and three digital Hall sensors to detect the rotor position. The electrical connections are designed as a plug-in system. Additional power electronics are required to operate the motor. Motor design with a hollow shaft is also available upon request. This allows the cables to run through the motor or the implementation of output on both sides.
Special features
▪ Designed with focus on rotational speed
▪ Enormous performance density – 3 times stronger than motors of
comparable size
▪ High overload resistance
▪ Ideally suited as direct drive, or generator for gearless applications
▪ Special winding upon request
▪ Design and manufacture of motor to specified operating point is
13.5 2.5
3x M4/ 4.8 deep
M5/ 8 deep 4x M3/ 4 deep
70.6
n.c.= please do not connect RM 2.54 / 10 PIN
W+P 3491-10
15°
10= W-Phase
16
3200.00-3000.75-02/20220209
